Industrie Mag - Le journal de l'industrie.
- accueil .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
 L’utilisation de robots dans l’espace revêt une importance grandissante au moment où les scientifiques repoussent les limites de l’exploration spatiale. Les recherches aérospatiales menées actuellement par des
organismes comme la NASA et la CSA (Agence spatiale canadienne) se concentrent sur l’exploration planétaire grâce au développement de robots mobiles sans pilote. A l’instar du rover Curiosity de la NASA, de nouveaux rovers en cours de développement permettront d’explorer les surfaces lunaire et martienne, et même celle d’astéroïdes.
L’utilisation de robots dans l’espace revêt une importance grandissante au moment où les scientifiques repoussent les limites de l’exploration spatiale. Les recherches aérospatiales menées actuellement par des
organismes comme la NASA et la CSA (Agence spatiale canadienne) se concentrent sur l’exploration planétaire grâce au développement de robots mobiles sans pilote. A l’instar du rover Curiosity de la NASA, de nouveaux rovers en cours de développement permettront d’explorer les surfaces lunaire et martienne, et même celle d’astéroïdes.
Willem Petersen, chercheur au sein de l’équipe de Recherche en Mouvement de l’Université de Waterloo, collabore avec John McPhee, professeur en ingénierie de conception de systèmes, et la CSA, au développement d’un modèle ultra-fidèle de roue pour rover d’exploration planétaire afin de comprendre l’interaction entre la locomotion du rover et le manque de densité du terrain. Le rover étant susceptible de rester coincé en cours d’exploration à la suite d’une perte d’adhérence, au risque de mettre en danger le succès de la mission, il est absolument essentiel de comprendre les interactions roues-sol pour concevoir un rover planétaire efficace et performant.
L’équipe a choisi MapleSim, logiciel avancé de modélisation physique de Maplesoft, comme outil clé de leur processus de développement. Ils ont découvert que l’approche symbolique de MapleSim contribuait à l’obtention de modèles ultra-fidèles tout en fournissant des simulations dépassant ou approchant la performance en temps réel. Cette démarche se traduit par les temps de simulation les plus courts en comparaison des modèles similaires créés à l’aide d’outils de modélisation classiques.
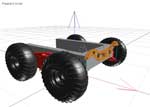
Modèle de rover Juno
Grâce à MapleSim et à la bibliothèque de composants de pneumatiques MapleSim, Willem Petersen et le professeur McPhee ont conçu un modèle symbolique de dynamique multicorps du rover Juno de la CSA, avec un modèle inédit d’interaction pneus/sol. Le modèle de rover Juno correspond directement à la structure du système physique et comprend un châssis principal, une suspension à balancier flottant dépendant du châssis, et quatre pneumatiques. Le mécanisme de suspension, conçu avec trois basculeurs interconnectés, permet aux deux roues situées de chaque côté du rover de pivoter par rapport au châssis. Cette disposition répartit uniformément la charge sur les quatre roues et maintient la hauteur du châssis constante lorsque le rover évolue librement en terrain accidenté et rencontres des obstacles importants.
Le modèle d’interaction pneus/sol a été validé par deux expériences distinctes du rover Juno, qui ont permis de comparer les résultats de la simulation de MapleSim avec les données réelles obtenues à l’aide d’un prototype physique. La première expérience constituait en un test d’effort de traction servant à l’identification des paramètres inconnus concernant le sol, tandis que la seconde était dévolue à la vérification de ces paramètres, effectuée lors d’une manoeuvre de conduite du rover sur un terrain en trois dimensions. Les chercheurs ont comparé les résultats de la simulation dynamique de progression réalisée dans MapleSim avec les données expérimentales générées par un prototype physique du rover Juno de la CSA. Ils ont alors découvert que les résultats du modèle pneus/sol MapleSim concordaient parfaitement avec les données expérimentales.
Les futures recherches auront pour objectif une meilleure connaissance des paramètres du modèle, de leur sensibilité et de la façon dont ils affectent la dynamique du modèle. Elles contribueront au développement d’un modèle plus général de pneumatique. La recherche étudiera également le comportement du modèle en contact sur des surfaces dures. L’implémentation de modèles de contact sur des systèmes de calcul parallèles dans le but de simulations plus rapides et de géométries plus complexes constitue une recommandation supplémentaire en vue de recherches ultérieures.
« Du fait de la remarquable fidélité de modélisation de MapleSim, le prototypage physique ne sera plus nécessaire à l’avenir pour la conception des rovers. En conséquence, les ingénieurs feront de substantielles économies de coûts et de délais de production, sans compter la souplesse de conception », conclut le professeur John McPhee.
Pour une discussion plus approfondie sur ce cas de recherche de rover Juno, vous trouverez une étude technique sur :
http://www.maplesoft.com


