Industrie Mag - Le journal de l'industrie.
- accueil .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
 De conception plus simple, ils peuvent également être moins coûteux et nécessiter moins de maintenance. Pour obtenir ces avantages, le système de motorisation qui anime un robot à roues doit être soigneusement spécifié en fonction des exigences et de l’environnement propres à l’application, en tenant compte des aspects de durabilité, d’efficacité et de bruit.
De conception plus simple, ils peuvent également être moins coûteux et nécessiter moins de maintenance. Pour obtenir ces avantages, le système de motorisation qui anime un robot à roues doit être soigneusement spécifié en fonction des exigences et de l’environnement propres à l’application, en tenant compte des aspects de durabilité, d’efficacité et de bruit.
Pradeep Deshmane, ingénieur principal réducteurs et R&D chez Portescap, et Manoj Pujari, ingénieur en chef produit et développement chez Portescap, discutent des exigences de mouvement pour les robots à roues.
Un gros avantage des robots est leur capacité à exécuter des tâches que les êtres humains peuvent estimer difficiles ou dangereuses à accomplir. Beaucoup d’applications de ce type dépendent de robots sur roues. Du point de vue des constructeurs, ils sont plus faciles à concevoir, à fabriquer et à programmer. Pour l’utilisateur, à condition que le terrain ne soit pas jonché d’obstacles, les robots à roues peuvent être plus rapides, plus efficaces et plus résistants. De ce fait, ces robots sont utilisés aussi bien pour l’inspection des pipelines que dans des environnements de soins de santé, voire à domicile.
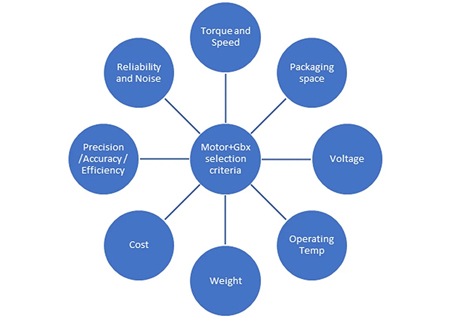
 Le système de moteur et de réducteur fait partie intégrante d’un robot à roues. Fondamentalement, le système doit être compact et léger, et capable de générer le couple requis pour permettre au robot de se déplacer dans le milieu spécifié. Fréquemment utilisés dans des environnements rigoureux, ils doivent également être très endurants. Dans de nombreuses applications, qu’il s’agisse de surveillance militaire ou en milieu hospitalier, les émissions de bruit doivent aussi être minimes. Les robots à roues nécessitent en outre, et c’est d’une importance cruciale, une haute efficacité énergétique et une faible consommation électrique.
Le système de moteur et de réducteur fait partie intégrante d’un robot à roues. Fondamentalement, le système doit être compact et léger, et capable de générer le couple requis pour permettre au robot de se déplacer dans le milieu spécifié. Fréquemment utilisés dans des environnements rigoureux, ils doivent également être très endurants. Dans de nombreuses applications, qu’il s’agisse de surveillance militaire ou en milieu hospitalier, les émissions de bruit doivent aussi être minimes. Les robots à roues nécessitent en outre, et c’est d’une importance cruciale, une haute efficacité énergétique et une faible consommation électrique.
C’est pour toutes ces raisons que des moteurs à courant continu (CC) avec ou sans balais sans fer, couplés à des réducteurs planétaires compacts sont fréquemment recommandés. Le système de mouvement devant tenir dans un espace de moins de 40 mm de diamètre, des moteurs et des réducteurs miniatures sont indispensables. Malgré cette compacité, le couple de sortie du réducteur doit généralement supporter 4 à 8 Nm à des régimes compris entre 50 et 150 tr/min.
Pour déterminer la spécification, il faut d’abord calculer le couple de sortie voulu. Pour ce faire, il est nécessaire de prendre en compte l’accélération souhaitée, mais également le diamètre des roues et la masse. L’équation doit aussi intégrer les exigences de couple nécessaires pour gravir des pentes ou franchir des obstacles, et, enfin, le frottement et l’efficacité de déplacement.
Après le calcul du couple requis, on peut déterminer la vitesse de rotation des roues. Le choix du moteur et du réducteur appropriés peut ensuite être fait en fonction de la fréquence de sortie. De manière générale, plus la tension de fonctionnement est élevée, plus la capacité de vitesse du moteur est élevée.
S’il est nécessaire de prévoir un encombrement suffisant pour le codeur, le frein, le moteur et le réducteur, un paramètre important lors de l’emboîtage est l’empilement des composants, car il faut s’assurer de la bonne température de fonctionnement et de l’absence de surchauffe. Dans de telles circonstances, il peut être nécessaire d’envisager des techniques de dissipation thermique et de capacité du moteur pour en assurer la fiabilité lorsque le robot est déployé sur le terrain.
Portescap a récemment fourni la solution de mouvement pour un robot à quatre roues motrices. Les deux paires de roues motorisées, tournent dans le même sens. Il est vital que le système de mouvement commande les deux paires de manière à ce qu’elles tournent à la même vitesse. Dans le cas contraire, la vitesse globale du robot sera réduite et la direction ne sera pas alignée. À la différence d’une direction différentielle qui utilise des roues entraînées séparément, cette solution à quatre roues motrices comporte un mécanisme de direction différentielle qui ne nécessite qu’un seul moteur, réduisant ainsi son encombrement, sa consommation d’énergie et son coût.
La solution a été obtenue en utilisant un moteur cc à balais 35 GLT Portescap et un réducteur planétaire présentant un rapport de réduction total de 99,8. Dans un module de 32 mm de diamètre et 115 mm de long seulement, la capacité de couple de sortie du réducteur atteint 8 Nm avec une vitesse de sortie de 80 tr/min. Affichant une espérance de vie de 1 000 heures, le système de mouvement est capable de résister à des températures maximales de 125 °C. Ces résultats procurent un mouvement fiable et durable à diverses applications de robot à roues.
Le terrain peut être un défi pour les robots à roues, en particulier dans les environnements rocailleux, les fortes pentes ou les zones à faible frottement. Si des technologies telles qu’une chenille avec un entraînement différentiel et un entraînement à 4 roues à direction à glissement sont de plus en plus souvent utilisées, des techniques permettant d’optimiser les solutions de mouvement existantes peuvent également être déployées pour augmenter la durabilité, l’efficacité et réduire le bruit.
Il est par exemple possible d’ajouter des roulements à aiguilles pour accroître la durée de vie et le rendement en évitant les défaillances dues au grippage et assurer une rotation régulière des roues planétaires. S’assurer que le réducteur comporte la combinaison de dents optimale avec des forces de torsion réduites peut aussi réduire le bruit, ce qui peut être amélioré avec une simulation acoustique poussée pour prédire les émissions de bruit.
Pour obtenir un système de mouvement optimal pour un modèle de robot à roues, il est crucial de le spécifier sur la base de l’analyse des exigences de l’application et de l’environnement dans lequel le robot va intervenir. Les ingénieurs de Portescap peuvent proposer une panoplie de solutions de mouvement robotique, avec des techniciens capables de créer des conceptions personnalisées répondant à des besoins précis.